
Anywhere. Anytime. Hassle-free. A robot that collaborates with everyone.
Introducing the all-new COBOTTA, a human-friendly, compact, and collaborative six-axis robot you can take anywhere and automate tasks right away. No expert knowledge is required, making operation quick and simple. Do you need that extra hand? Do you want to leave basic and repetitive tasks to robots and make more time for more complex work? COBOTTA will open infinite possibilities to address your needs and realize creative, new ideas.
Max Payload |
Reach |
Position Repeatability |
0.5kg |
342.5mm |
±0.050mm |
Overview
Safety Design

Collaborative robots do not require safety fences. The unique outer contour has no sharp edges, and consists of curves that prevent hands from getting caught. Sensors are built into the six moving parts for constant monitoring of speed and torque, to guarantee safety from a functional aspect (third-party certification pending).
Portable Body

The main unit weighs approximately 4kg providing easy portability, and offers a load capacity of 500g. The integrated controller not only reduces wiring, but also allows consolidated control with other devices. ORiN is supported as standard.
Easy to Use

COBOTTA is equipped with a direct teaching function and an intuitive GUI for easy programming. An optional camera can be mounted to enable teaching using the camera.
Open Platform

The integrated controller is open, and COBOTTA’s control API is made public, allowing creators to develop their own applications in the environment they choose (055 version).
Specifications
| Model name | COBOTTA |
| No. of axes | 6 axes (arm unit) + 1 axis (electric gripper unit) *1 |
| Drive motor | AC servomotors for all axes |
| Brakes | Brakes for 1, 2, 3, 4 and 5 axes |
| Overall arm length (first arm+second arm) | 342.5mm (165mm+177.5mm) |
| Maximum payload | 0.5kg (0.7 kg within ±10 degrees with the wrist angled downward) *2 |
| Position repeatability | ±0.05mm *3 |
| Maximum composite speed (center of tool mounting face) | 4.32sec in the factory configuration, 1.6sec when set to maximum speed (Reciprocating movement time for 200mm in the horizontal direction and 25mm in the vertical direction) |
| Software | Standard version: COBOTTA-dedicated software OSS version: None (*Linux, etc. may be installed by the customer) |
| Power supply specifications (AC adaptor) | Input: Single-phase AC100 - 240 V±10%/47 - 63 Hz |
| External signal | Dedicated input: 12 points / Dedicated output: 71 points General-purpose input: 8 points / General-purpose output: 9 points External emergency stop connection x 1 ch |
| External communication | Ethernet x 1 line, USB x 2 lines, VGA output x 1 ch |
| Safety specifications | Standard Version: ISO 10218-1:2011, ISO/TS 15066:2016, ISO 13849-1:2015 PL d, Cat. 3 |
| OSS version: ISO 13849-1:2015 PL d, Cat. 3 | |
| Pollution degree *4 | 2 |
| Overvoltage category | Ⅱ *5 |
| Noise | <55 dB(A) |
| IP classification | Unit: IP30 AC adapter and AC cable: IP20 |
| Approximate weight | 4kg |
| *1 Optional | |
| *2 Without electric gripper | |
| *3 Precision figures assume use at a constant ambient temperature. | |
| *4 Pollution degree 2 environment is equivalent to home and office areas. | |
| *5 Overvoltage category Ⅱ* refers to energy consuming equipment which receives electricity from a stationary facility (such as an AC power outlet) | |
| This product is an industrial robot that can coexist and work collaboratively with an operator. Prior to use, be sure to conduct a risk assessment and reduce risks adequately in compliance with related laws and regulations and applicable standards (including ISO 12100: 2010). | |
Downloads
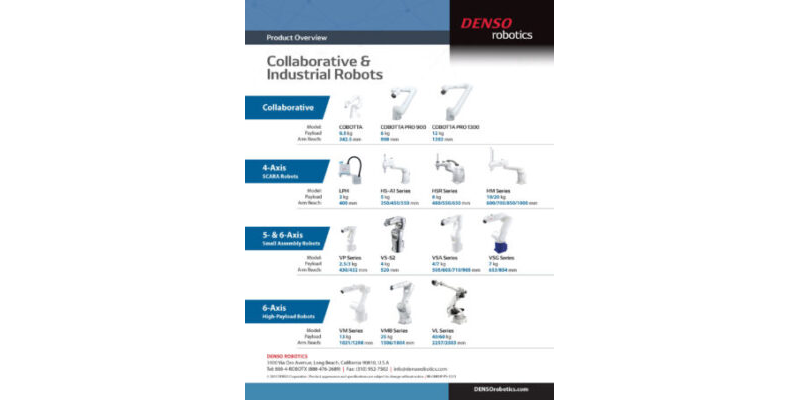
Collaborative & Industrial Robots Lineup Card
- Version
- Download 0
- File Size 4.00 KB
- File Count 1
- Create Date May 1, 2025
- Last Updated May 1, 2025

COBOTTA PRO Collaborative Robot Brochure
12-page product sheet with features, specifications and dimensions.
- Version
- Download 548
- File Size 0.00 KB
- File Count 1
- Create Date May 22, 2023
- Last Updated May 22, 2023
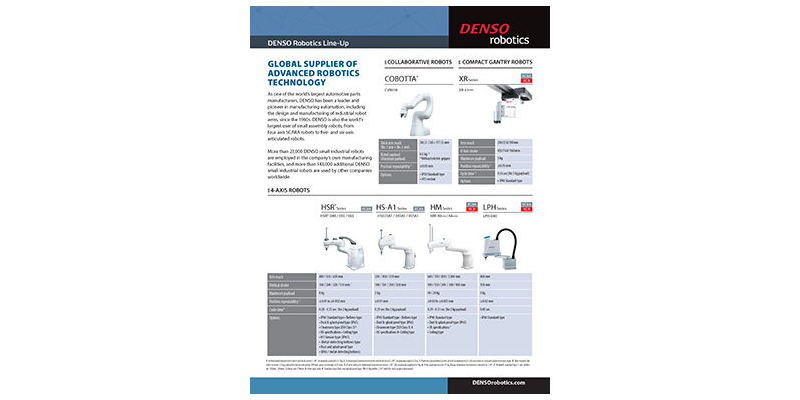
Robot Series Product Sheet
Overview of all DENSO robots
- Version
- Download 1952
- File Size 0.00 KB
- File Count 1
- Create Date June 9, 2022
- Last Updated January 16, 2024

COBOTTA Collaborative Robot Product Sheet
Two-page product sheet with features, specifications and dimensions.
- Version
- Download 276
- File Size 0.00 KB
- File Count 1
- Create Date October 15, 2021
- Last Updated October 15, 2021
CAD Files and Manuals
Find 2D/3D CAD data, application software, PDF manuals, and part lists. (Account registration required)
Online/Interactive Manuals
Account registration required.